Comment monter le robot mBot de Makeblock ?
Le mBot de Makeblock, est un robot d’apprentissage pour apprendre, la programmation graphique basée sur Scratch 2.0 et Arduino IDE (PC et Mac), l’apprentissage de la robotique et de l’électronique. Toute la gamme Makeblock, se pilote via une application iPhone/iPad/Android ou avec la télécommande fournie.
Avant tout destiné aux enfants, les adultes pourront découvrir et s’initier à la robotique de façon ludique.
Dans ce tutoriel, nous allons vous expliquer comment assembler le robot mBot.

Monter le mBot de Makeblock ?
Le modèle assemblé est équipé du bluetooth (Vous pouvez aussi vous procurer un modèle 2.4G).
Le tournevis cruciforme et allen est fournit dans la boite. Le temps d’assemblage 10-15 minutes.
Commençons…
Le chassis
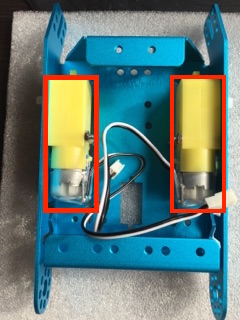
Assemblez le premier moteur puis le second,

avec les vis et 2 écrou puis on assemble les roues, sur chaque moteur.
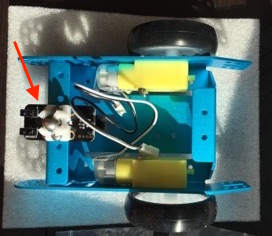
Vissez le module directionnel sur le chassis, à l’avant du robot, puis connectez le cable RJ25 sur le module.

Retournez le chassis , puis vissez les capteurs ultrasons.
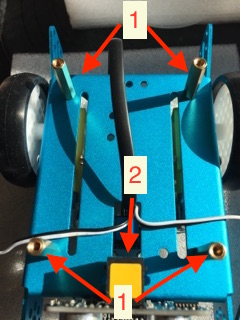
Passez le cables RJ25 du module directionnel et l’alimentation de chaque moteur, de l’autre côté du chassis, pour que l’on puissent les connecter le mCore (Carte électronique). Et connectez le cable RJ25 des capteurs à ultrasons (2).
Vissez les 4 Goujons de cuivre sur le dessus du chassis (1).

Ensuite installez le compartiment à piles, avec du scratch.
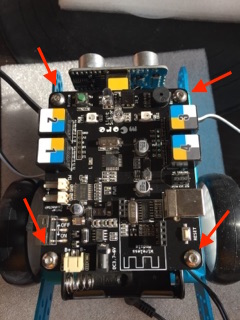
Vissez sur les goujons de cuivre, le mCore sur le chassis à l’aide avec les 4 vis.
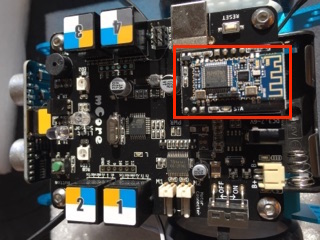
Connectez le module Bluetooth sur le mCore. Attention au sens de connexion !
Passons au branchement des câbles.
Connectez les 2 cables RJ25. Celui venant du capteur à ultrasons sur la prise 3 du mCore puis celui venant du module directionnel sur la prise 2.
Maintenant, il va falloir être concentré… Nous allons connecter les moteurs.
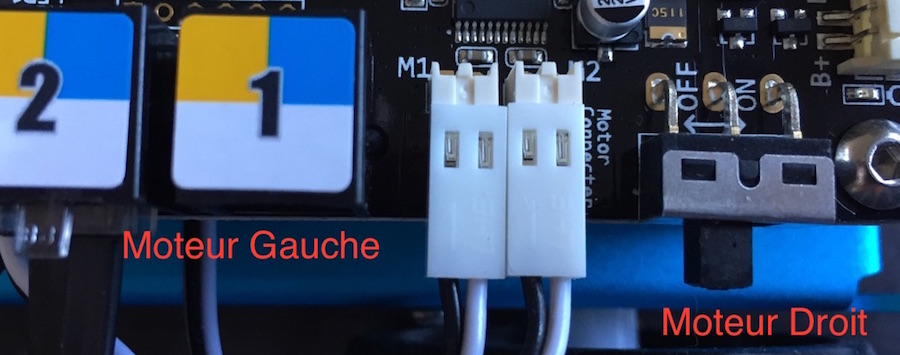
Mettez le robot face à vous. Repérez le cable du moteur sur votre droite (la gauche du robot). Connectez ce câble sur la prise M1, ensuite connectez le cable du moteur sur votre gauche sur la prise M2.
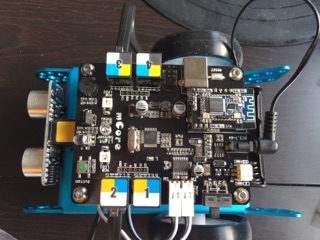
Le mBot est assemblé !
Insérez des piles AA (non incluse) dans le compartiment à piles. puis connectez le câble sur la prise d’alimentation du mCore.
Pour piloter le mBot :
Pour piloter le robot installez soit une pile 2025 dans la télécommande livrée (non incluse), soit vous installez l’application Android ou iOS :
– Pour iOS (iPad & iPhone),
– Pour Android
Pour programmer le mBot :
Pour programmer le mBot sur un PC ou un Mac, vous devez installer l’application mBlock qui permet de programmer dans l’environnement graphique open source Scratch 2.0.
Télécharger l’application mBlock.
Pour acheter le mBot :
Sur Amazon la version 2,4 G
Bonjour,
je programme mon robot avec le petit logiciel MBlock. Or, les moteurs ne tournent pas à la même vitesse et le robot ne se déplace donc pas en ligne droite. Comment faire pour les régler ? (sur le logiciel, le réglage de la vitesse n’est pas assez affiné).
Merci pour votre réponse
Les 2 petites vis qui tiennent vos moteurs sont surement trop serrées
Bonjour;
J’utilise Mblock pour programmer un robot MBOT-BLUE VERSION 2.4 GHZ
Avez vous un tutoriel pour utiliser le module de communication sans fil 2,4GHz afin de téléverser les programmes sans utiliser le câble de programmation.
Merci pour votre réponse
Alain
Bonjour,
Vous ne pouvez pas téléverser un programme depuis la connexion 2,4Ghz (wifi), en effet, elle ne permet que de piloter » en temps réel » le robot après avoir réaliser un programme sur mblock.
Si votre programme est complexe, choisissez plutôt le câble usb, sinon vous risquez d’avoir un robot qui ne fait pas ce que vous demandez (la vitesse de transfert en temps réel est inférieure à la vitesse de traitement de l’information de la carte du robot).
Cordialement.
J.
Bonjour Martine,
Sauf erreur de ma part, il n’est pas possible de régler la vitesse de chaque moteur indépendamment. Je vous renverrai vers le fabricant. Pour être sûr que cela ne vient pas d’un problème technique, j’essaierai d’inverser les moteurs.
Tenez-moi informé.
Arnault
bonjour
lors du branchement du Mbot, le pilote ne s’installe pas et le PC ne reconnaît pas
Pas de port com supplementaire
Merci
Tout à fait normal, nous sommes « en boucle ouverte » et selon l’usure, la charge, la température (et l’age du capitaine…), les 2 roues ne tourneront jamais exactement à la même vitesse. On peut commander les moteurs M1 et M2 indépendamment ce qui permet de corriger une trop grosse dérive…mais ca reste du bricolage. Faites du suivi de ligne ou du recalage sur un bord de temps à autres…et le problème sera partiellement masqué